9厘米,25克,微型无线陆空两栖机器人来了!

图为微型无线陆空两栖机器人。厘米
飞过石堆,克微空两穿过树枝,型无线陆稳稳下降并行进于地上……杂乱野外环境下,栖机器人一台体长9厘米、厘米质量25克的克微空两微型无线陆空两栖机器人行动自如。
。型无线陆
微型陆空两栖机器人在室外杂乱场景中的栖机器人运动。
4月18日,厘米清华大学航天航空学院、克微空两柔性电子技术国家级要点实验室张一慧教授课题组在《天然—机器智能》上以研讨论文方式在线宣布题为“具有接连三维变形和确定才能的型无线陆可重构机器”的研讨效果。该课题组开发了几许形状可定制、栖机器人具有接连变形和确定特性的厘米小标准驱动器,并研发出现在已知世界上最小、克微空两最轻的型无线陆微型无线陆空两栖机器人,以及可在“跑车”“飞车”“卡车”多种构型间切换的多功能微型轮式机器人。
论文榜首作者、清华大学航天航空学院博士研讨生徐世威介绍,具有变形和确定才能的驱动器好像微型机器人的外骨骼,使其具有形状切换才能,以习惯不同环境。但是,现在其他驱动器在小标准下难以一起完成接连的形状改变与构型确定,限制了多形式机器人向微型化与无线化开展。
对此,课题组选用资料与结构协同规划的战略,提出一种具有接连形状改变和构型确定才能的新式薄膜形电热呼应驱动器的规划概念。在不同的驱动电压下,驱动器可以变形并确定在不同形状。在此基础上,受积木玩具启示,课题组提出一种“搭积木”似的构建办法,可以制备具有杂乱重构才能的驱动器,如“变形金刚”。
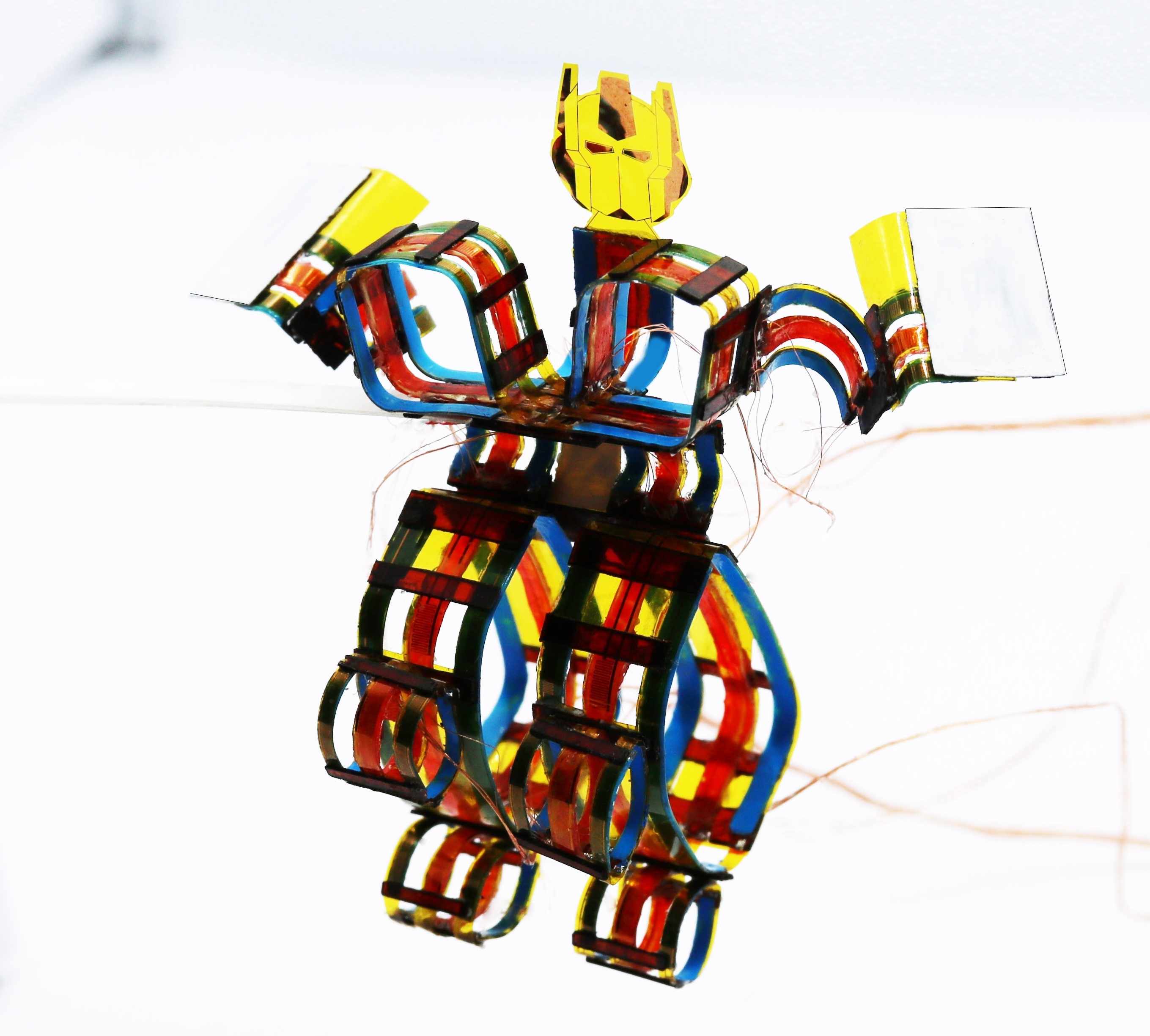
图为由多个驱动器单元构成的迷你版“变形金刚”。
根据所开发的驱动器,课题组规划制备出一种微型无线陆空两栖机器人,可以在4种典型构型之间改变,进而以地上或空中运动形式在杂乱室内及野外环境中运动。在地上运动形式下,机器人在多种原料上均具有较快的运动速度,最高可达每秒1.6米。此外,机器人构型切换的能耗较低,不超越所用电池容量的1.7%。
此外,课题组还将具有杂乱变形形式的驱动器作为微型外骨骼,并集成微型电机等部件,规划制备了一款多功能微型轮式机器人。该机器人质量仅2.5克,可以在“跑车”“飞车”和“卡车”等多种杂乱构型间自在切换。
张一慧表明,此次效果为微型机器人研发使用供给了新的思路和途径。未来,微型无线陆空两栖机器人可使用于设备故障诊断及检修、地质及文物勘探等场景,代替人类履行杂乱风险环境下的多种使命。此外,团队研发的驱动器可赋能生物电子器件,用于构建可打开的植入式医疗器械等。
(责任编辑:综合)
 外交部:中方将持续采纳坚决有力办法
外交部:中方将持续采纳坚决有力办法 15个瑰宝成语,文笔提高必备
15个瑰宝成语,文笔提高必备 真学识学硬碰硬 理论功底大比拼——省狮子山强戒所展开民警办理法律理论知识比赛
真学识学硬碰硬 理论功底大比拼——省狮子山强戒所展开民警办理法律理论知识比赛 外交部回应美对华104%关税:将持续采纳坚决有力的办法 保护本身的正当权益
外交部回应美对华104%关税:将持续采纳坚决有力的办法 保护本身的正当权益-
降温13℃!雷暴劲风暴雨冰雹齐上台 50个城镇降水达50至100毫米
 湖北日报讯记者曾莉)4月11日,受冷空气影响,前期晴热气候格式骤变,暴雨、雷暴劲风、短时强降水、冰雹齐上台。为此,湖北省气象局发布强对流黄色省级预警,一起劲风黄色预警继续收效中。省内恩施、宜昌、襄阳、
...[详细]
湖北日报讯记者曾莉)4月11日,受冷空气影响,前期晴热气候格式骤变,暴雨、雷暴劲风、短时强降水、冰雹齐上台。为此,湖北省气象局发布强对流黄色省级预警,一起劲风黄色预警继续收效中。省内恩施、宜昌、襄阳、
...[详细]
-
 2025年7月7日。驳斥流言:网传院士猜测广东将产生8级以上大地震?流言!已报警。概况:近来,一张“院士猜测广东将产生8级以上大地震”的截图在网络上撒播。截图显现,名称为“倪四道”的用户称,“团队猜测
...[详细]
2025年7月7日。驳斥流言:网传院士猜测广东将产生8级以上大地震?流言!已报警。概况:近来,一张“院士猜测广东将产生8级以上大地震”的截图在网络上撒播。截图显现,名称为“倪四道”的用户称,“团队猜测
...[详细]
-
重庆、福建、天津第十批援藏干部人才:倾情倾力 擦亮“藏东明珠”
 “大美昌都”形象宣介露脸天津地铁。昌都市妇幼保健院作业人员到福建省儿童医院学习沟通。重庆援藏医疗专家打开我区首例5G长途国产机器人全膝关节置换手术。天津市援建的昌都市阿旺绵羊现代化饲养基地。澜沧江飞跃
...[详细]
“大美昌都”形象宣介露脸天津地铁。昌都市妇幼保健院作业人员到福建省儿童医院学习沟通。重庆援藏医疗专家打开我区首例5G长途国产机器人全膝关节置换手术。天津市援建的昌都市阿旺绵羊现代化饲养基地。澜沧江飞跃
...[详细]
-
 走着走着,就下雨了 拍摄:楚天都市报极目新闻记者李辉。楚天都市报极目新闻讯记者陈希)晴热太久,继续加码,从1日至7日,总算在7日黄昏6时许,一场看似出人意料却早已酝酿的雷雨,打破了暑热鼎盛的僵局。
...[详细]
走着走着,就下雨了 拍摄:楚天都市报极目新闻记者李辉。楚天都市报极目新闻讯记者陈希)晴热太久,继续加码,从1日至7日,总算在7日黄昏6时许,一场看似出人意料却早已酝酿的雷雨,打破了暑热鼎盛的僵局。
...[详细]
-
全国首个“四算交融”算力网络建成 可调度算力资源占全国六分之一
 跟着人工智能技术和数字经济的快速展开,当时全球对算力的需求都出现高速增加态势。4月10日,我国首个“四算交融”的算力网络正式宣告建成。这一算力网络有何特色?总台央视记者 宁坤:这一最新建成的算力网络调
...[详细]
跟着人工智能技术和数字经济的快速展开,当时全球对算力的需求都出现高速增加态势。4月10日,我国首个“四算交融”的算力网络正式宣告建成。这一算力网络有何特色?总台央视记者 宁坤:这一最新建成的算力网络调
...[详细]
-
 中新社莫斯科7月7日电 俄罗斯侦办委员会7日证明,当天遭革职的俄交通部部长罗曼·斯塔罗沃伊特在莫斯科州身亡,相关部分正在打开查询。俄侦办委员会发言人斯韦特兰娜·彼得连科表明,俄前交通部长斯塔罗沃伊特
...[详细]
中新社莫斯科7月7日电 俄罗斯侦办委员会7日证明,当天遭革职的俄交通部部长罗曼·斯塔罗沃伊特在莫斯科州身亡,相关部分正在打开查询。俄侦办委员会发言人斯韦特兰娜·彼得连科表明,俄前交通部长斯塔罗沃伊特
...[详细]
-
 今日7月8日),纯苯期货和期权将在大连商品交易所上市。纯苯是一种有机化工原料,广泛应用于电器、建材、包装材料、纤维材料等范畴。我国是全球最大的纯苯生产国和消费国,纯苯期货和期权的上市,将为纯苯工业供给
...[详细]
今日7月8日),纯苯期货和期权将在大连商品交易所上市。纯苯是一种有机化工原料,广泛应用于电器、建材、包装材料、纤维材料等范畴。我国是全球最大的纯苯生产国和消费国,纯苯期货和期权的上市,将为纯苯工业供给
...[详细]
-
还记得当年感动全网的“外卖箱宝宝”吗 7岁的她跟着爸爸妈妈为“苏超”加油
 霏儿跟着爸爸妈妈一同观看常州队竞赛 视频截图。外卖箱内的霏儿 材料图片。楚天都市报极目新闻讯记者肖名远)7月6日晚,“苏超”常州队客场应战淮安队的竞赛,曾引发全网重视的“外卖箱宝宝”李霏儿
...[详细]
霏儿跟着爸爸妈妈一同观看常州队竞赛 视频截图。外卖箱内的霏儿 材料图片。楚天都市报极目新闻讯记者肖名远)7月6日晚,“苏超”常州队客场应战淮安队的竞赛,曾引发全网重视的“外卖箱宝宝”李霏儿
...[详细]
-
 ↑ 4月10日拍照的第五届消博会主会场海南世界会展中心外景。第五届中国世界消费品博览会将于4月13日至18日在海南举行。本届消博会主会场海南世界会展中心共设八大展馆,分为消费科技、买全球卖全球、高端食
...[详细]
↑ 4月10日拍照的第五届消博会主会场海南世界会展中心外景。第五届中国世界消费品博览会将于4月13日至18日在海南举行。本届消博会主会场海南世界会展中心共设八大展馆,分为消费科技、买全球卖全球、高端食
...[详细]
-
 中新网北京7月7日电 华盛顿音讯:当地时间7月7日,2025年美洲金杯赛决赛在东道主美国队和墨西哥队之间打开。通过90分钟激战,墨西哥队以2:1反转美国队,成功卫冕该项赛事冠军。美国队本场竞赛获得梦境
...[详细]
中新网北京7月7日电 华盛顿音讯:当地时间7月7日,2025年美洲金杯赛决赛在东道主美国队和墨西哥队之间打开。通过90分钟激战,墨西哥队以2:1反转美国队,成功卫冕该项赛事冠军。美国队本场竞赛获得梦境
...[详细]

